VELOCISTA NIVEL 1 ARDUINO
Preparado para entrar en el mundo de las competencias de Robótica, por que motivo no entrar y empezar por una de las competencias mas virales de todo el mundo, la de Robots velocistas...
Materiales básicos:
Arduino, pueden utilizar cualquier Arduino que tengan a su alcance, pero les recomiendo un Arduino Uno, Nano o Mini, cualquiera de estos les darán la cantidad de pines necesaria para nuestros sensores y motores.



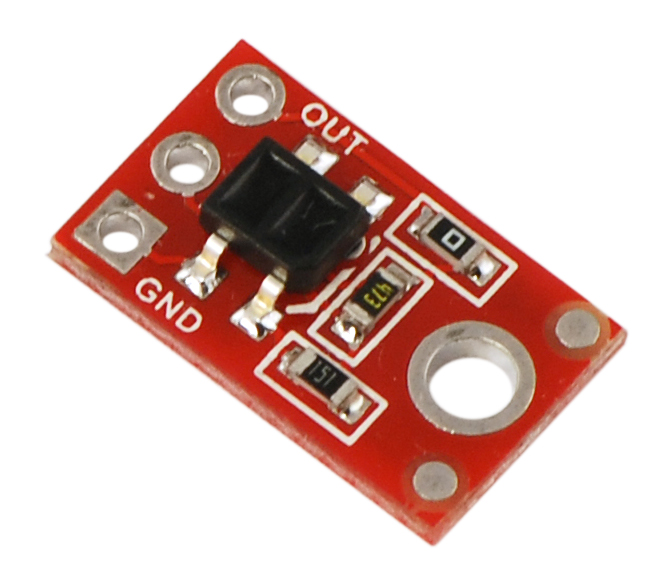
QTR-1A, QTR-1RC, son unos sensor de reflactancia con un Led infrarrojo y un fototransistor en un pequeño y económico modulo de 0.5" X 0.3" fácil de montar en cualquier lugar, para este robot solo necesitaremos dos de ellos.

L298n (Puente H), nos permite maniobrar dos motores, dar un frenado rápido, un manejo bidireccional y con posibilidad de implementar fácilmente el control de velocidad.


L293d (Puente H), este integrado nos sera útil para controlar nuestro dos motores, se instala directamente en nuestra protoboard y a comparación con el L298n, es mucho mas pequeño y liviano, solo utilizaremos uno.

Motorreductores, dependiendo de los que utilicemos sera el funcionamiento de nuestro velocista, les recomiendo unos de 300 RPM por su economía y su equilibro entre fuerza y velocidad.


Leds o diodos emisores de luz, son especiales para darnos señales visuales de que nuestro circuito esta funcionando correctamente.

Borneras, son pines de conexión, con tornillos para hacer una conexión mas segura y fija al circuito, para evitar desconexiones.




Resistencias, son reductores de voltaje para el manejo efectivo de los demás componentes para evitar daños en el circuito.

Cables Dupont, conductores de corriente eléctrica, para conectar a la protoboard y transmitirla de un punto a otro, en este robot utilizaremos macho-hembra y macho-macho.


Protoboard, es una placa de pruebas con huecos conectados internamente con patrones de lineas en el cual se pueden conectar componentes electrónicos y cables.

Rueda loca, es una rueda con posibilidad de giro de 360 grados para darle mas libertad a nuestro velocista en la pista y tener menos fricción con la misma.



LM7805, es un regulador de voltaje necesario para reducir el voltaje de nuestra batería a 5V necesario para hacer funcionar nuestros sensores QTR-1RC o QTR-8RC, sin dañarlos.


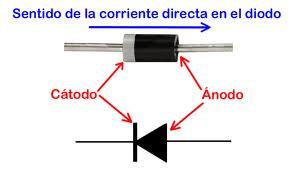
Diodo Rectificador 1N4004, es un dispositivo eléctrico por el cual cuando fluye un voltaje en una dirección la electricidad fluye a través de él y cunado recibe un voltaje en dirección opuesta el flujo de electricidad es bloqueado, nos ayudara a evitar cortos por conectar mal nuestra batería.

Interruptor SW, sera el puente de energía para activar y desactivar nuestro robot.

Base para nuestro robot, esta ya queda en sus manos, la pueden construir en cualquier material que tengan a su disposición (balso, triplex, plástico, acrílico, etc...) pero deben tener en cuenta varios factores uno de ellos es la resistencia, en caso de un choque no dañarse, tan bien ser ligero, no puede ser muy pesado o nuestro velocista sera muy lento y esta debe ser aislada, en caso de que nuestra base sea metálica, debemos aislarla para evitar cortos en nuestro circuito.




Aquí les dejamos unos ejemplos de robots ya construidos.
Diseño del circuito:
Empecemos con el montaje del circuito de nuestro robot velocista nivel 1.



{kind=link}
Comentarios
Publicar un comentario